
Authors:
(1) Clement Lhos, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA;
(2) Emek Barıs¸ Kuc¸uktabak, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA and Center for Robotics and Biosystems, Northwestern University, Evanston, IL, USA;
(3) Lorenzo Vianello, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA;
(4) Lorenzo Amato, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA and The Biorobotics Institute, Scuola Superiore Sant’Anna, 56025 Pontedera, Italy and Department of Excellence in Robotics & AI, Scuola Superiore Sant’Anna, 56127 Pisa, Italy;
(5) Matthew R. Short, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA and Department of Biomedical Engineering, Northwestern University, Evanston, IL, USA;
(6) Kevin Lynch2, Center for Robotics and Biosystems, Northwestern University, Evanston, IL, USA;
(7) Jose L. Pons, Legs and Walking Lab of Shirley Ryan AbilityLab, Chicago, IL, USA, Center for Robotics and Biosystems, Northwestern University, Evanston, IL, USA and Department of Biomedical Engineering, Northwestern University, Evanston, IL, USA.
Table of Links
V. Conclusion, Acknowledgment, and References
III. RESULTS
A. Validation of Deep-Learning Predictions
The proposed LSTM model was evaluated using a leaveone-out cross-validation approach: in each iteration, the model was trained on five subjects and then tested on the remaining subject. In this test, we compared a model using instantaneous kinematic data (TW = 0 ms) and another using a history of kinematic data (TW = 300 ms). Fig. 3 shows the prediction for each model evaluated on the test set composed by Subject Four and the ground truth value.
The model using instantaneous kinematic data resulted in a prediction time of 201±70.7 µs on a laptop (ThinkPad X1 Carbon 5th, Lenovo), while utilizing the history of kinematic data resulted in a prediction time of 573±308 µs.
In terms of the prediction accuracy, the model incorporating a history of kinematic data produced a higher accuracy (TW = 0 ms: R2 = 0.84 ± 0.03, MSE = 1.8 × 10−2 ± 0.4; TW = 300 ms: R 2 = 0.90±0.02, MSE = 1.1×10−2 ±0.3). Tab. I provides a detailed report of the model’s accuracy for individual users. Specifically, it includes R 2 performances for both the training and test sets for TW = 0 ms and TW = 300 ms conditions.
B. Closed-Loop Performance During Treadmill Walking
After validation of the deep-learning predictions, we compared the closed-loop performance of the proposed method for αˆ estimation and the measured ground truth α from the treadmill force plates. Specifically, estimated or measured stance interpolation factor values were used as inputs to the WECC controller [7] and resulting kinematics and interaction torque errors were evaluated during walking. During the closed-loop tests, we focused on the model with TW = 300 ms due to its improved accuracy compared to TW = 0 ms, while still obtaining a prediction time suitable for real-time implementation (0.57 ms).
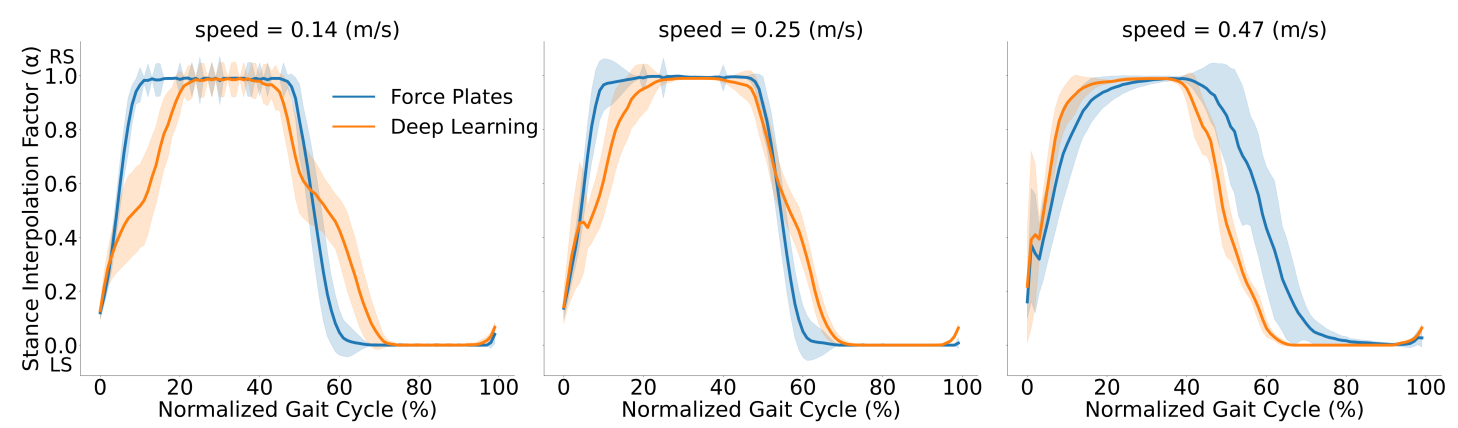
In Fig. 4, we illustrate the stance interpolation factor with respect to normalized gait duration under different conditions. The stance interpolation factor values obtained from treadmill force plates and the deep-learning approach are displayed for three different speeds (0.14 m/s, 0.25 m/s, 0.47 m/s). Compared to using force plate values, the proposed method resulted in longer stance time during slower walking and shorter stance time during faster walking. At 0.14 m/s, stance duration was 56.0 ± 4.8% of the gait cycle using the treadmill force plates versus 67.1 ± 9.7% using deep learning. At 0.25 m/s, stance duration was similar between the two approaches: 59.6±6.99% of the gait cycle using the treadmill force plates, and 65.1±1.6% using deep learning. Finally, at 0.47 m/s, the treadmill force plates resulted in a stance duration of 69.3±10.2% versus 59.7±5.74% using deep learning.
Interaction torque errors were investigated to evaluate the quality of the haptic rendering and transparency, using the force plates and the deep-learning predictions for the stance interpolation factor in real time. Fig. 5 presents the interaction torque tracking performance during the rendering mode while using the force plate measurements and deep-learning estimation in the dynamic robot model. It was observed that interaction torque error is higher with the deep-learning method at the start of the swing. Specifically, toe-off (60-70% of the gait cycle) led to an average hip interaction torque error of 0.068 Nm/kg using force plates and 0.109 Nm/kg using deep learning. However, this error was lower for the deep-learning approach in the stance phase. Within the 20- 50% range of the gait cycle, the average hip interaction error was 0.111 Nm/kg using force plates and 0.033 Nm/kg using deep learning. The mean of the interaction torque error over the whole cycle, across three users, was comparable between the two conditions. At the hip joint, mean absolute interaction torque errors of 0.101 ± 0.004 Nm/kg and 0.094 ± 0.005 Nm/kg were observed with the deep-learning and force plate conditions, respectively. Similarly, the mean absolute interaction torque error at the knee joint was 0.119±0.006 Nm/kg and 0.113±0.006 Nm/kg for the deep-learning and force plate conditions.
Fig. 6 shows the results of the transparency performances on both conditions. The deep-learning approach resulted in a relatively smaller hip interaction torque error compared to the force-plate condition (0.063±0.006 Nm/kg vs. 0.073±
0.008 Nm/kg). On the other hand, the deep-learning approach resulted in a higher interaction torque error at the knee joints between 60% and 70% of the normalized gait, corresponding to the beginning of the swing phase. The mean knee interaction torque error in this period was −0.207 Nm/kg for the force plate condition and −0.312 Nm/kg for the deep-learning approach. Users also qualitatively reported that the exoskeleton felt heavier at this particular moment of the gait cycle. Across the whole gait cycle, the mean interaction torque error for the knee joint was similar for the deep-learning and the force plate conditions (0.078±0.007 Nm/kg vs. 0.071±0.007 Nm/kg).
C. Closed-Loop Performance During Overground Walking
During the overground tests, it was observed that the users preferred to walk at a slightly faster speed using the FSR footplates (0.241 ± 0.024 m/s) compared to the deep-learning estimation (0.198 ± 0.020 m/s). Results from Fig. 7B show similar kinematic patterns between the two conditions, particularly in the magnitudes of the joint angles. In the temporal domain, a longer stance period was observed with the deep-learning approach (75.3 ± 2.7%) compared to the FSR condition (63.1 ± 1.6%). Furthermore, Fig. 7 presents the interaction torque error over a gait cycle, for a representative user, using FSRs or deep learning. The interaction torque error, averaged over two users, was higher for the deep-learning condition (Hip: 0.094 ± 0.009 Nm/kg using FSR and 0.120 ± 0.014 Nm/kg using deep learning; Knee: 0.083 ± 0.007 Nm/kg using FSR and 0.116 ± 0.009 Nm/kg using deep learning).
This paper is available on arxiv under CC BY 4.0 DEED license.